Elastic Robot Links: Curse or Blessing? (Part 2)
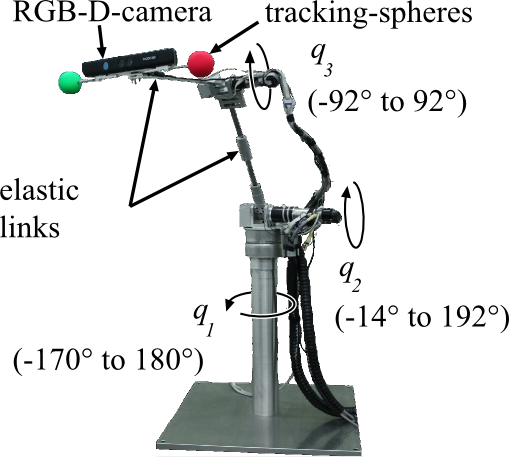
In first place, elasticity in the links of robot arms prolongs settling times and deteriorates the positioning accuracy. However, the feasibility of fast and precise end effector positioning for an elastic link arm has been exemplified with ball catching experiments[1] Malzahn, Jörn, Anh Son Phung, and Torsten Bertram. “A Multi-Link-Flexible Robot Arm Catching Thrown Balls.” 7th … Read more