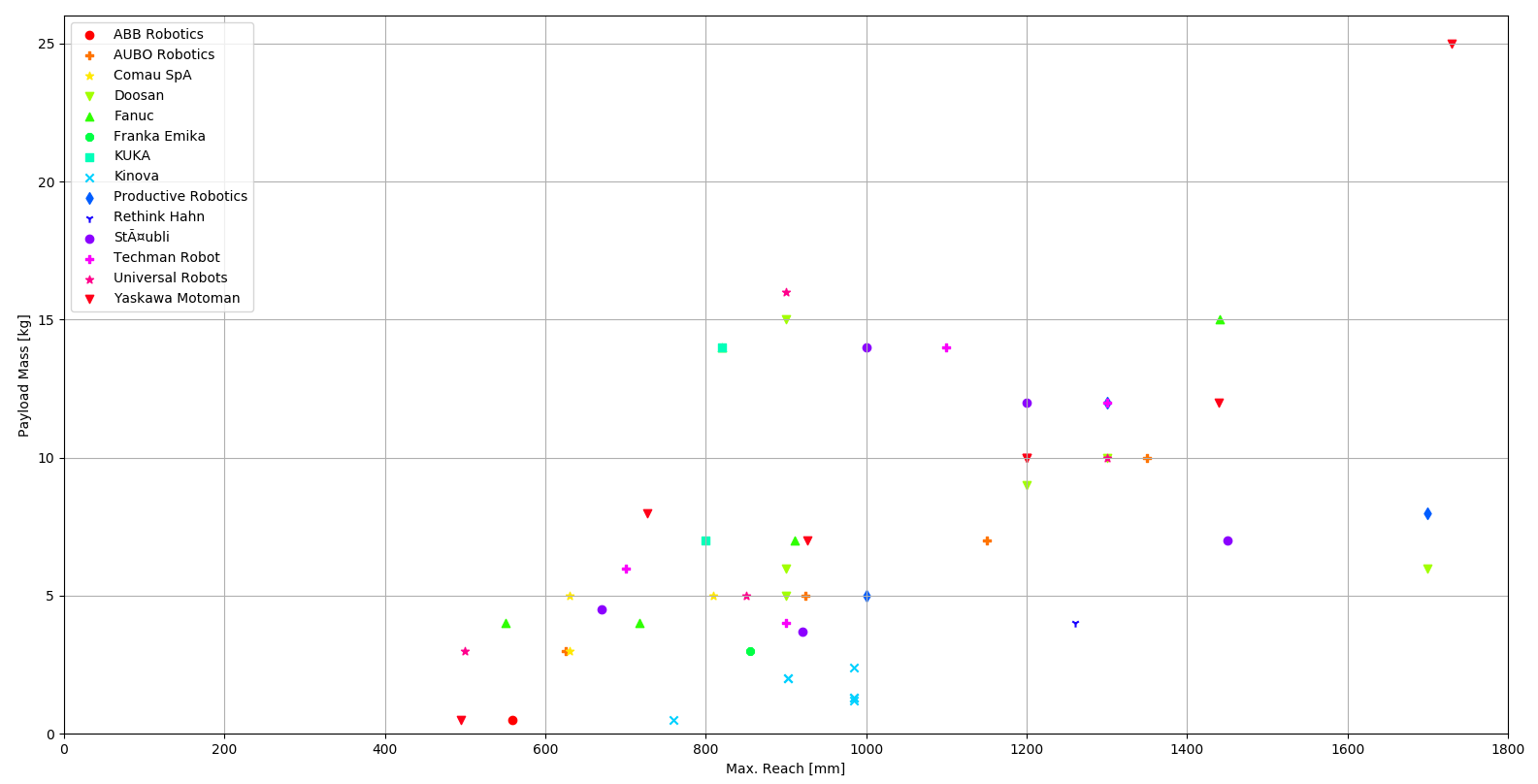
Cobots on the Market: Payload vs Velocity
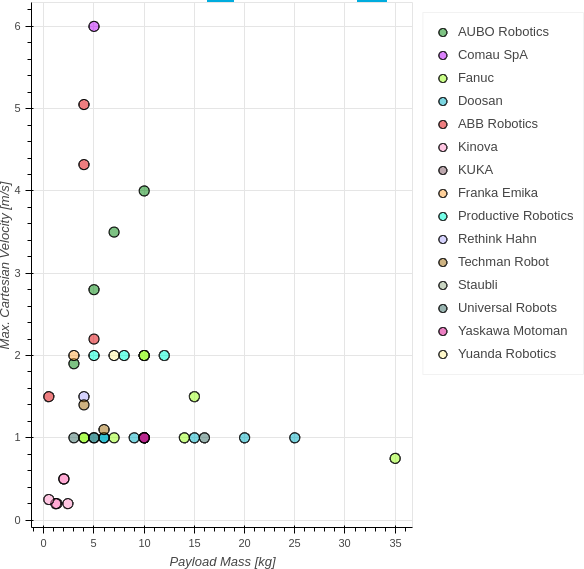
A few months ago I wrote about payload versus maximum reachability of current cobots on the market. I received plenty of feedback on this plot. Some sounded like: “Thanks for sharing. But your plot misses the information on the velocity that the robot can reach.” Hence, in this post I share with you another plot. … Read more