In first place, elasticity in the links of robot arms prolongs settling times and deteriorates the positioning accuracy. However, the feasibility of fast and precise end effector positioning for an elastic link arm has been exemplified with ball catching experiments[1] Malzahn, Jörn, Anh Son Phung, and Torsten Bertram. “A Multi-Link-Flexible Robot Arm Catching Thrown Balls.” 7th German Conference on Robotics; Proceedings of ROBOTIK. VDE, 2012.. Next, if the detrimental effects are properly attenuated by a suitable inner control loop the given intrinsic compliance can be exploited to actively shape the effectively reflected arm compliance. This has been demonstrated in an earlier article, where the probability of breaking even fragile objects in case of accidental collisions is significantly reduced.
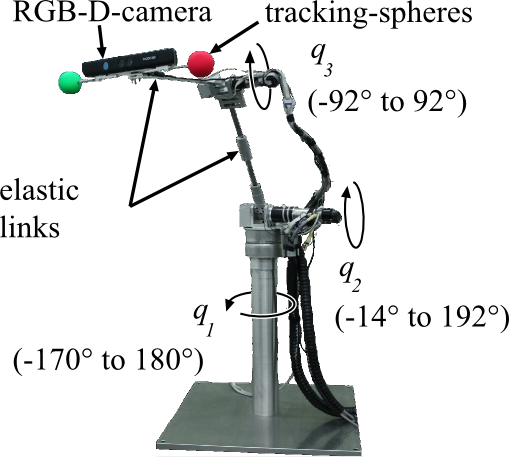
The video above shows the next step, where accidental collisions are explicitly detected based on a model of the damped arm dynamics. The video introduces the elastic link setup TUDOR and comprises in total of seven experiments on oscillation damping, repeatable blunt as well as sharp impacts on balloons and fragile Christmas balls, less repeatable sharp impacts on a human arm and a demonstration of a physical interaction.
The strain gauge pairs applied close to the hubs on each passively compliant link are used as load side torque sensors. Provided that oscillations are sufficiently damped, the remaining dynamics of the arm can be described analogously to rigid arms. This way collision detection and reaction techniques previously applied to rigid or elastic joint robots[2]De Luca, Alessandro, et al. “Collision detection and safe reaction with the DLR-III lightweight manipulator arm.” IEEE/RSJ International Conference on Intelligent Robots and Systems. … Continue reading can be readily used with the elastic link robot. The provided results imply that link elasticity is not necessarily just a problem. In contrast, advanced control concepts possibly reveal new perspectives.
Jörn Malzahn is researcher at the Institute for Control Theory and Systems Engineering at the TU Dortmund University, Germany. His main research field is modeling and control of leightweight multi-link flexible robot arms.
| ↑1 | Malzahn, Jörn, Anh Son Phung, and Torsten Bertram. “A Multi-Link-Flexible Robot Arm Catching Thrown Balls.” 7th German Conference on Robotics; Proceedings of ROBOTIK. VDE, 2012. |
|---|---|
| ↑2 | De Luca, Alessandro, et al. “Collision detection and safe reaction with the DLR-III lightweight manipulator arm.” IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2006. |
1 thought on “Elastic Robot Links: Curse or Blessing? (Part 2)”