It is a demanding challenge to avoid unwanted structural elasticity during the design of lightweight robot mechanisms. Link elasticity aggravates the precise position control of the robot due to configuration dependent static deflections and prolong settling times because of long lasting oscillations. Apart from robotics we find similar design criteria in e. g. in fire-rescue turntable ladders as well as construction machines such as concrete pumps or cherry pickers.
What if the requirements for high stiffness in lightweight links could be relaxed because the undesired effects can be compensated by means of advanced control concepts? Perhaps such control concepts could turn link elasticity from a problem into novel opportunities. More lightweight mechanisms could be developed just by using less material. As a consequence actuators could have smaller dimensions and rated power.
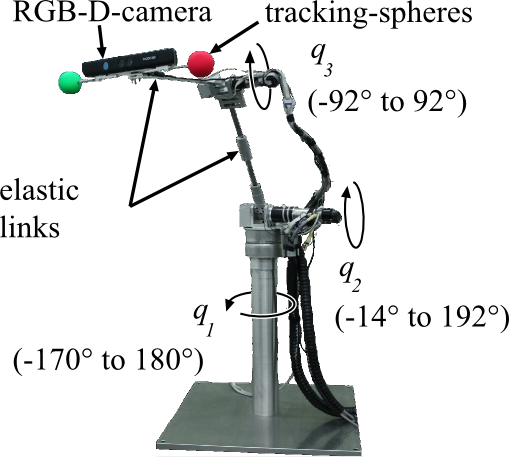
This is actually the idea behind my research project. Within this project we developed the 3 degree-of-freedom flexible link experimental setup TUDOR, depicted in the neighboring figure.

TUDOR comprises of three brush-less DC motors and two spring steel blades as flexible links. After typical point to point movements oscillation amplitudes range up to 10 cm. Currently many scientific papers are published dealing with structural elasticity in robots. The majority focuses on the elasticity integrated in the joints or generally the actuation mechanisms. In this regard actuators with variable stiffness are a really hot topic at the moment. The elasticity enables the decoupling of the relatively low link inertias to the large actuator inertias. This way the reflected inertia which a human would effectively experience during a physical human robot contact as well as hopefully the injury potential of the robot may be reduced. On the other hand elastic components can store and release potential energy. If this energy is released at the wrong moment and in the wrong way this could lead to a wipe like effect and even increase the injury potential of a robot in a contact situation with a human operator. Nevertheless if this happens in a controlled way it has been shown that more natural and dynamic movements can be generated with artificial mechanisms. As a conclusion sophisticated control concepts are required to exploit the various potentials of structural elasticity in robots.
From a control theoretical point of view the elastic properties in the robot joints are easier to deal with. The elasticity is concentrated along the same axis of action as the actuator. In contrast a dominant elasticity in the robot links is distributed along the link body so that deflection waves travel along the structure in finite time introducing delays into the control system. This may be the reason why the majority of publications concerning structural elasticity focus on elastic joints.
With TUDOR we investigated if it is possible to precisely fulfill a time critical task in spite of oscillations and load as well as configuration dependent static deflections. As a demonstrator we thought of the ball catching scenario depicted below:

A human throws a ball towards the robot. A Kinect camera is utilized to detect and track the ball and further predict the intercept point within the robot work space. The robot then positions a net mounted at the tip at this intercept point. Our results are summarized in the following video:
As soon as oscillations can be rapidly damped and static deflections are compensated we no longer have to understand link elasticity „just as a problem“. Moreover the link compliance can be exploited to sense contact forces, detect collisions and to react accordingly. With moderately flexible joints has already been imposingly exemplified. Regarding flexible links oscillation damping is still an open challenge. This holds especially for multi-link chains.
During the last few days we might have been able to make first steps beyond pure oscillation damping. Based on strain measurements we developed a force control scheme which simultaneously dampens oscillations introduced by joint motions as well as external disturbances and allows to actively influence the reflected arm compliance in joint space. We collected some experiments in the following video:
The control concept behind the video follows an independent joint control strategy. The joint angles of each actuator are controlled by a cascaded position controller with an inner velocity and a motor-current loop. The torques acting on the individual joints due to oscillations, gravitational influences and physical interactions of the robot with its environment are inferred via strain measurements on each link. This information is fed back to each independent joint motion controller to actively influence the reflected joint compliance while simultaneously damping oscillations. The control concept allows reducing the reflected compliance such that the probability of breaking even fragile objects in case of accidental collisions is significantly reduced. Just a small force is necessary to push the robot away from its initial position.
What now? Link elasticity: curse or blessing? There are still many open challenges to solve and questions to answer before a binding statement can be given. For me it seems as if there are also some opportunities slumbering in elastic robot links and I`m looking forward to see where the journey takes us.
Jörn Malzahn is researcher at the Institute for Control Theory and Systems Engineering at the TU Dortmund University, Germany. His main research field is modeling and control of leightweight multi-link flexible robot arms.
1 thought on “Elastic Robot Links: Curse or Blessing?”